|
LEG POWERED ORNITHOPTER
|
dcgeorge.com
|
The personal website of Douglas C. George.
|
|
PTERANODON TEN
A design exercise and ruminations on a human powered ornithopter
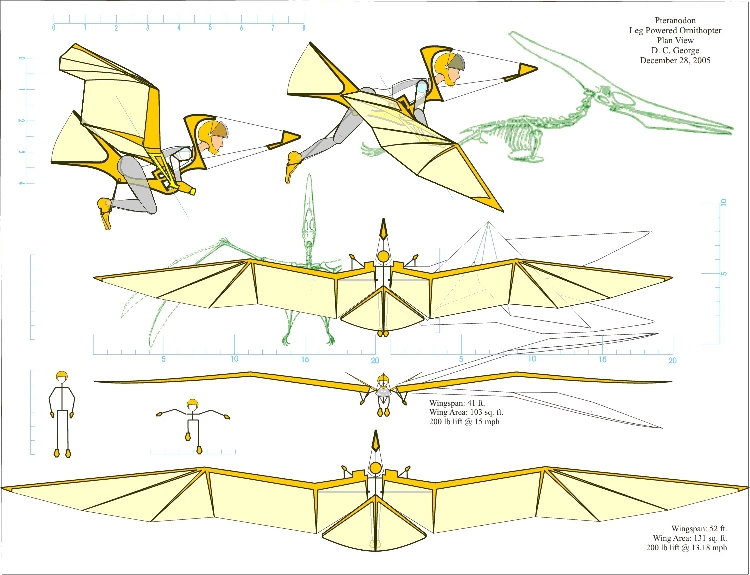
The Pteranodon Ten is a design exercise to explore the possibilities for a leg powered ornithopter. Except for a bird's hollow bones, humans and birds have essentially the same mechanical structure, the same muscles and the same servo-feedback mechanisms. Other than hollow bones, the crucial difference is that, in birds, the breast muscles are maximized for powered flight while, in humans, the leg muscles are the most developed. It would seem, therefore, that for a muscle powered ornithopter, humans must somehow utilize leg muscles to power the wings strokes. Arm and hand muscles would be utilized for those control functions, such as angle of attack, that require less power.
Learning how to do anything requires three essential processes: 1) setting a goal; 2) real-time monitoring of actual conditions; and 3) servo-feedback circuits to close the gap between the actual condition and the intended goal. With this in mind, learning how to fly boils down to wanting to fly and having large, appropriate aerodynamic surfaces coupled to our biological servo-feedback mechanisms. Given a decent set of wings, we could learn how to fly.
The intention here is to put flying on the same level as surfing or bicycling. You would learn by trying. Flying is a complicated business, of course, and learning to fly this machine would require special procedures---like being suspended from a rotating yardarm or properly tethered in a airflow. Because the feet are mechanically linked to the wings, I imagine the feel of it would be something like standing on two surfboards that are tied together in the middle but independently free to rotate. It wouldn't be easy but it shouldn't be impossible either.
The Pteranodon Ten is envisioned primarily as a soaring machine with the added capability of leg-powered flapping.
The basics
- With the wings fixed at the proper angle of attack, taking off would be accomplished by running down a slight incline to reach lift-off speed followed by a transition to powered wing strokes.
- In the design version illustrated, power for the down stroke is transmitted to the wings through cables attached to foot stirrups.
- The basic flapping motion is envisioned as a slow rowing action of three or four seconds per cycle. The idea is to provide lift by gently moving a large amount of air.
- The transition from running takeoff to powered flight as well as the reverse transition for landing would be tricky. The foot stirrup cables would have to be disengaged while the pilot runs for takeoff and again after touching down. The details of these functions are being worked out.
- Takeoff speed would depend on the shape of the wing and the wing area: the 41 ft. wing span illustrated above would produce 200 lbs. of lift at about 15 MPH and the 52 ft. span would produce 200 lbs. lift at slightly over 13 MPH. Wings thin in cross section with a large camber would be in order.
- Energy is supplied primarily by the pilot's leg muscles while the angle of attack of the wings and other control functions are managed by the arms and hands. Each wing is controlled independently.
- The wings hinge at an angle to the airframe body so that basic stroke motion would be restricted to down/forward and up/back.
- To provide forward thrust as well as lift, the angle of attack of the wings would be turned downward for the power stroke. At the bottom of the down stroke, the wings would be returned to a slightly positive angle of attack and remain that way during the backstroke (click on the link below to see a brief movie). The strongest lift would be produced by the down stroke but some amount of lift would be produced throughout the slow back swing.
- The back swing would be passively driven by wind pressure while its swing-rate would be restricted by a device (a pneumatic bladder, perhaps) that stores up the wind energy. The stored energy could then be used to boost the next down stroke.
- If the hands are removed from the control handles, the wings would automatically assume a neutral glide mode.
- To shed excess loads caused by gusts, the wings are mounted forward of the center of lift (as they are in birds) to allow them to twist about the long axis. This would provide a constant-lift capability as opposed to the constant-angle-of-attack dynamics of fixed wing aircraft.
- The empty weight of the aircraft would have to be in the range of 25 to 35 pounds.
Click the link below to watch a brief-and-flaky animation. (It's better if you can set your viewer to continuous-loop mode) And, please note that the animation is too fast; imagine the flapping cycle to be much slower (like around three or four seconds).